Face Recognition and Tracking Framework for Human–Robot Interaction
A real-time face recognition and tracking system for intuitive HRI, integrating lightweight CNNs and ROS.
Real-Time Face Recognition and Tracking for Human–Robot Interaction
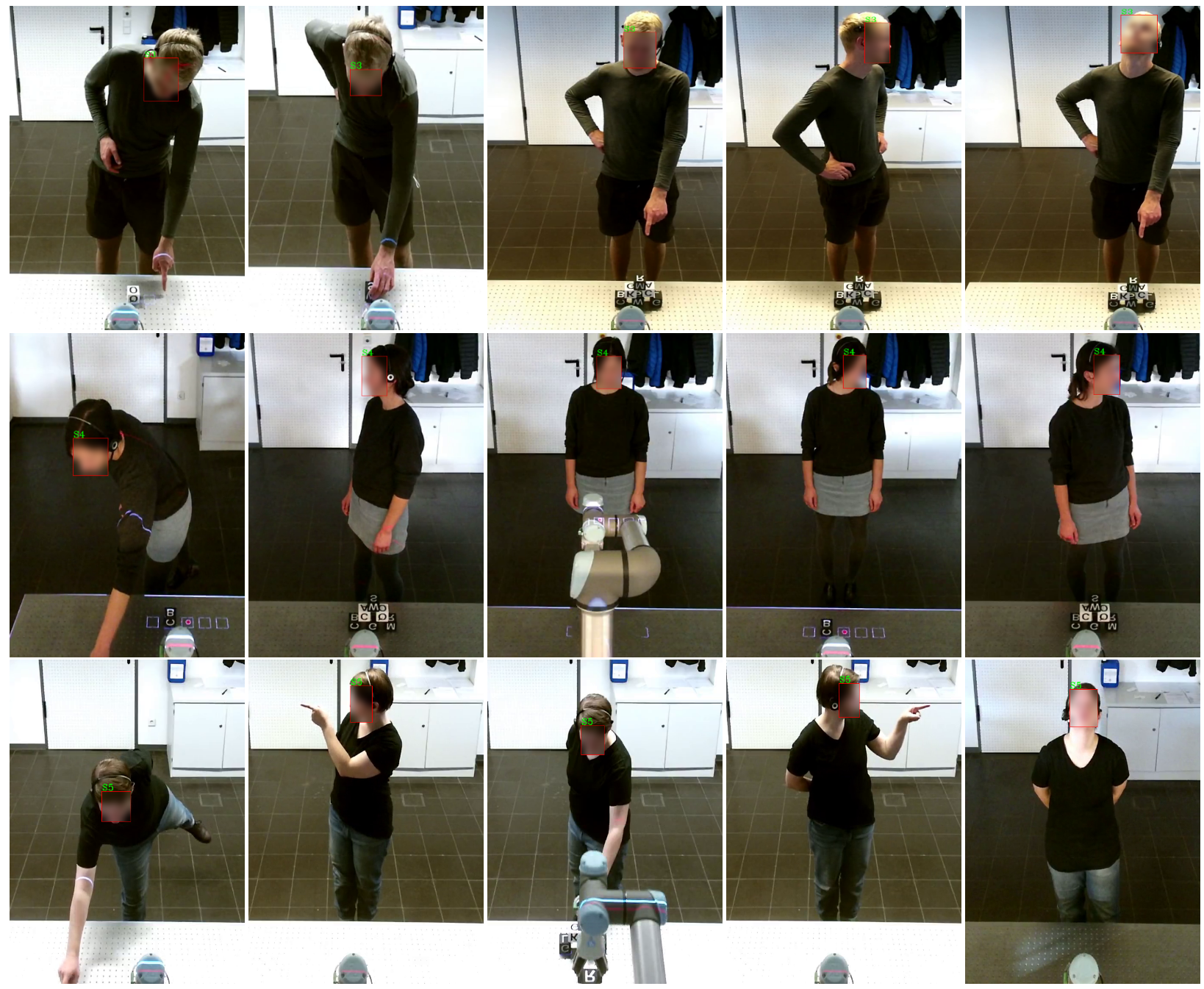
This paper presents a lightweight, ROS-integrated face recognition and tracking framework for real-time human–robot interaction (HRI), designed to handle unconstrained environments including occlusions, lighting variations, and pose changes.
The framework is implemented as part of the RoSA (Robot System Assistant), supporting intuitive interaction with industrial robots via facial, speech, and gesture input. Built on RetinaFace and ArcFace and combined with SORT-based face tracking, it significantly improves recognition reliability and system performance.
Key Highlights:
- ArcFace + MobileFaceNet for robust feature embeddings with high recognition precision.
- RetinaFace with MobileNet enables fast and accurate detection and alignment.
- SORT tracking integrates Kalman filtering and Hungarian matching for efficient multi-face tracking.
- Achieves ~35 FPS, enabling real-time operation on ROS-powered robotic systems.
- Tested on RoSA’s real-time experiments and Wizard-of-Oz videos with 11 and 36 subjects, respectively.
Evaluation:
- Average precision: 99%, recall: 95%, F-score: 97%
- Online evaluation shows tracking boosts recognition rate from 76% → 94%
- Dataset validation on ChokePoint confirms consistent improvements in recognition and speed.
Practical Impact:
By assigning IDs to tracked faces and fusing them with body tracking, RoSA:
- Avoids identity mix-ups,
- Enables seamless multi-user interaction,
- Enhances UX in collaborative robotic tasks.
This work lays the foundation for integrating perceptual identity into intelligent HRI systems and scales to real-world industrial applications.
Fulltext Access
https://doi.org/10.3390/app12115568
Citing
@article{RoSA_Face2022,
author = {Khalifa, Aly and Abdelrahman, Ahmed A. and Strazdas, Dominykas and Hintz, Jan and Hempel, Thorsten and Al-Hamadi, Ayoub},
title = {Face Recognition and Tracking Framework for Human--Robot Interaction},
journal = {Applied Sciences},
volume = {12},
number = {11},
pages = {5568},
year = {2022},
doi = {10.3390/app12115568},
publisher = {MDPI}
}