RoSA
Robot System Assisten
Motivation
Modern production and service environments increasingly rely on flexible robot teams. However, intuitive control and collaboration with such systems remain a challenge, especially for non-expert users. Most existing interfaces are either overly complex or limited to single input modes. The motivation behind RoSA is to create a natural, flexible, and efficient system that enables any user to engage with multiple robots using familiar interaction forms—without needing technical training.
Goals
- Design a natural interaction interface for human–robot collaboration.
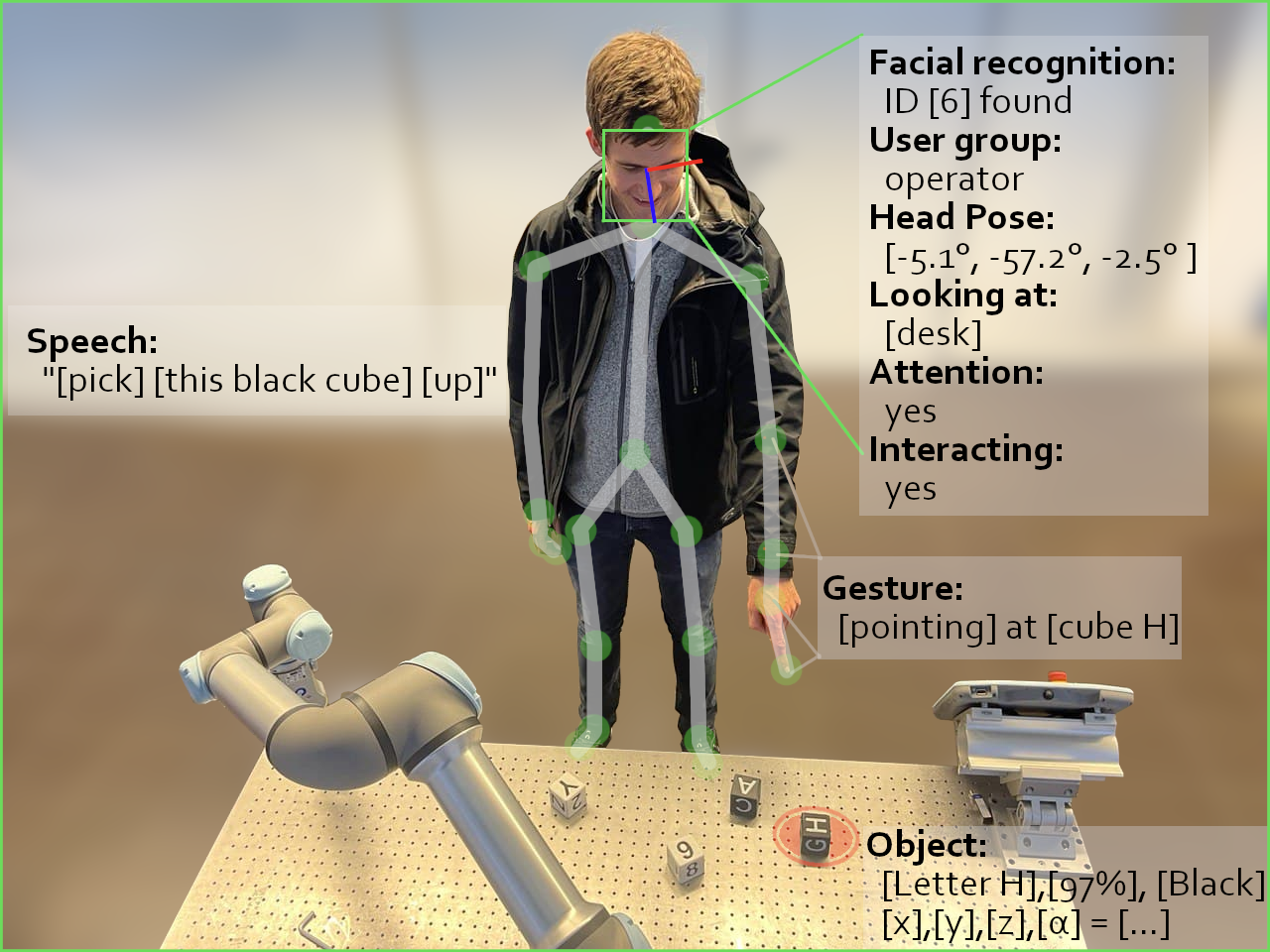
- Support multimodal inputs including speech, touch, and gestures.
- Enable robot selection and task assignment in both on-site and telerobotic contexts.
- Maintain high usability and low cognitive load, even under stress or uncertainty.
- Provide adaptive feedback to support mutual understanding between humans and robots.
- Conduct iterative user studies to evaluate and refine RoSA’s design and effectiveness.