SEMIAC
Implicit mobile human-robot communication for spatial action coordination with action-specific semantic environment modelling
Object Detection Environment 3D (ODE-3D)
The ODE-3D dataset was created and analyzed as part of a Master’s thesis conducted within the framework of the DFG project SEMIC. The thesis was authored by Christian Becker under the supervision of Magnus Jung, and evaluated by Prof. A. Al-Hamadi and Dr. G. Krell. The dataset is currently in the publication process.
Abstract
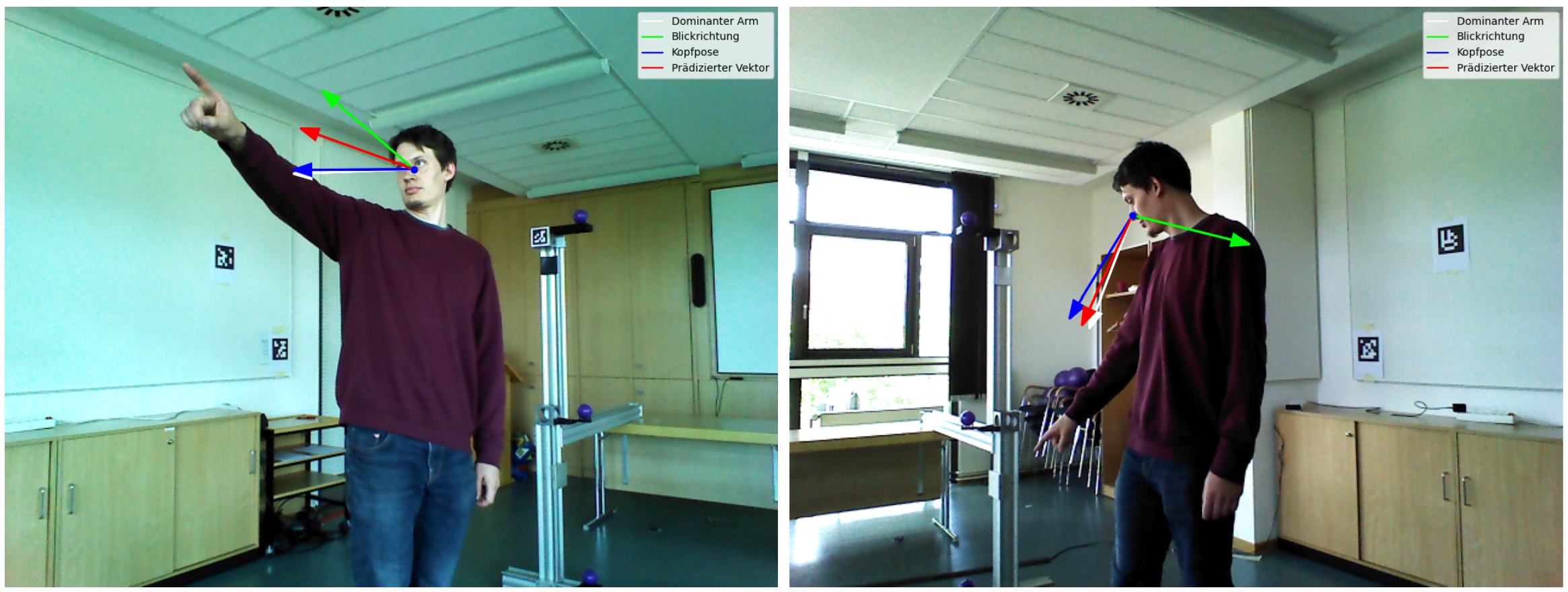
In cooperative environments, human-machine interaction can simplify human work and make it more efficient. For easy accessibility and greater acceptance, this interaction must be intuitive. The machine must be able to recognize and understand the human communication signals. This information can be used to identify focused objects in the environment. This work investigates the attention- based detection of target objects based on the modalities of gaze direction, head pose, and pointing gesture. For this purpose, a new dataset is designed and recorded to provide a reference for target object detection. The Object Detec- tion Environment 3D (ODE-3D) dataset provides image data from a realistic human-machine interaction and contains all relevant information about the posi- tion of objects in a three-dimensional space. By fusing the modalities using machine learning methods, target object detection is implemented based on the recorded dataset. An implementation in a real-time application demonstrates the potential use in a cooperative human-machine environment.
Founding
The project is funded by the German Research Foundation (DFG) under grant No. 502483052 and is planned with a project duration of 3 years (2023 to 2026).