SEMIAC
Implicit mobile human-robot communication for spatial action coordination with action-specific semantic environment modelling
SEMIAC, a Wizard of Oz Dataset
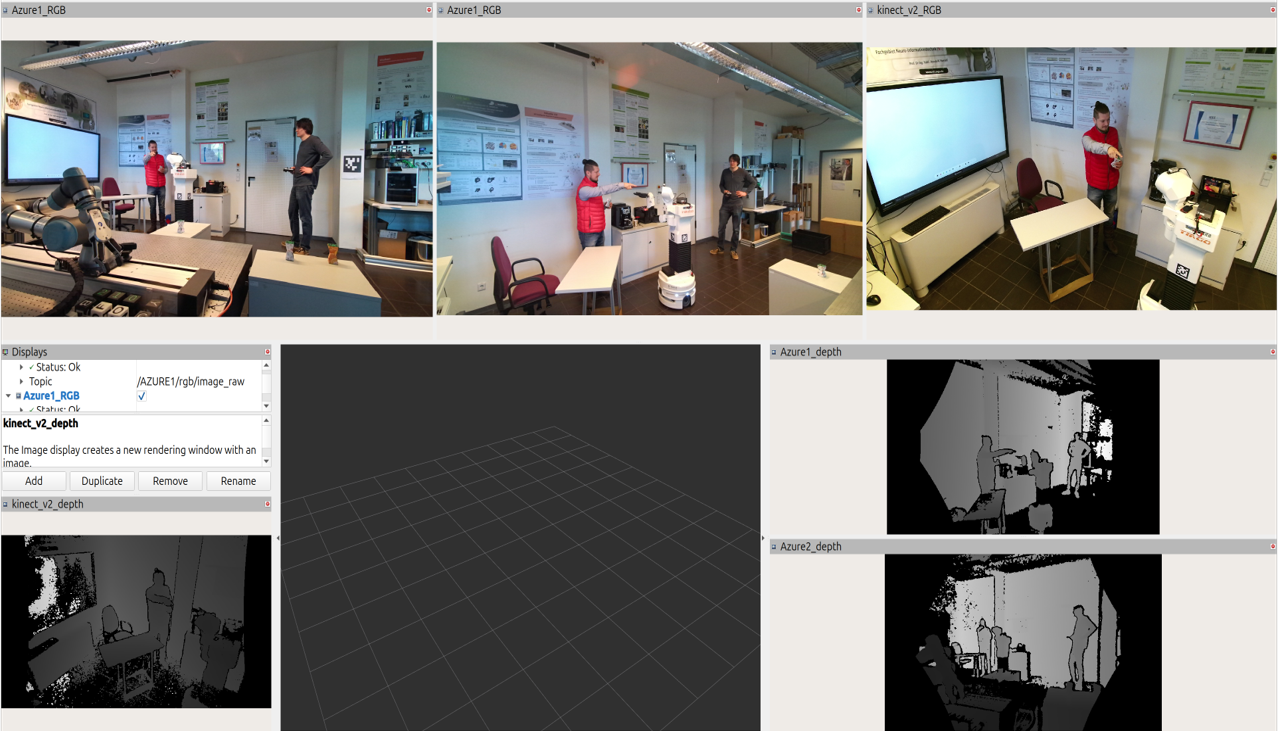
The SEMIAC dataset was collected as part of the DFG-funded SEMIAC project and contains extensive multimodal recordings of human-robot interaction in a logistics-related context. A total of 40 participants took part, 20 in Magdeburg and 20 in Bielefeld. For each participant, five sessions of approximately eight minutes were recorded, using multiple camera perspectives, including the ego view of the humanoid robot Tiago (Pal Robotics), as well as depth and audio data.
The recordings were conducted as a Wizard-of-Oz study, in which the robot appeared to act autonomously but was actually controlled by a human operator. The main objectives are to capture and analyze non-verbal interaction signals, human responses to erroneous robot behavior, as well as proxemic behavior, path planning, human goal prediction, and attention states during interaction.
The dataset is currently being annotated and prepared for GDPR-compliant publication. It will be released in two sub-datasets, one focusing on interaction (single person and multi person), and the other on path planning and proxemics. The dataset release and accompanying publication are currently in preparation.
Founding
The project is funded by the German Research Foundation (DFG) under grant No. 502483052 and is planned with a project duration of 3 years (2023 to 2026).