SEMIAC
Implicit mobile human-robot communication for spatial action coordination with action-specific semantic environment modelling
Publications

Automated 3D Dataset Generation for Arbitrary Objects
Paul Schulz, Thorsten Hempel and Ayoub Al-Hamadi
IEEE Access 2025
Scene-Aware Prediction of Diverse Human Movement Goals
Qiaoyue Yang, Amadeus Weber, Magnus Jung, Ayoub Al-Hamadi and Sven Wachsmuth
ROBOVIS 2025

Learning Human–Robot Proxemics Models from Experimental Data
Qiaoyue Yang, Lukas Kachel, Magnus Jung, Ayoub Al-Hamadi and Sven Wachsmuth
Electronics 2025

Dominykas Strazdas, Matthias Busch, Rijin Shaji, Ingo Siegert and Ayoub Al-Hamadi
Frontiers in Robotics and AI 2025
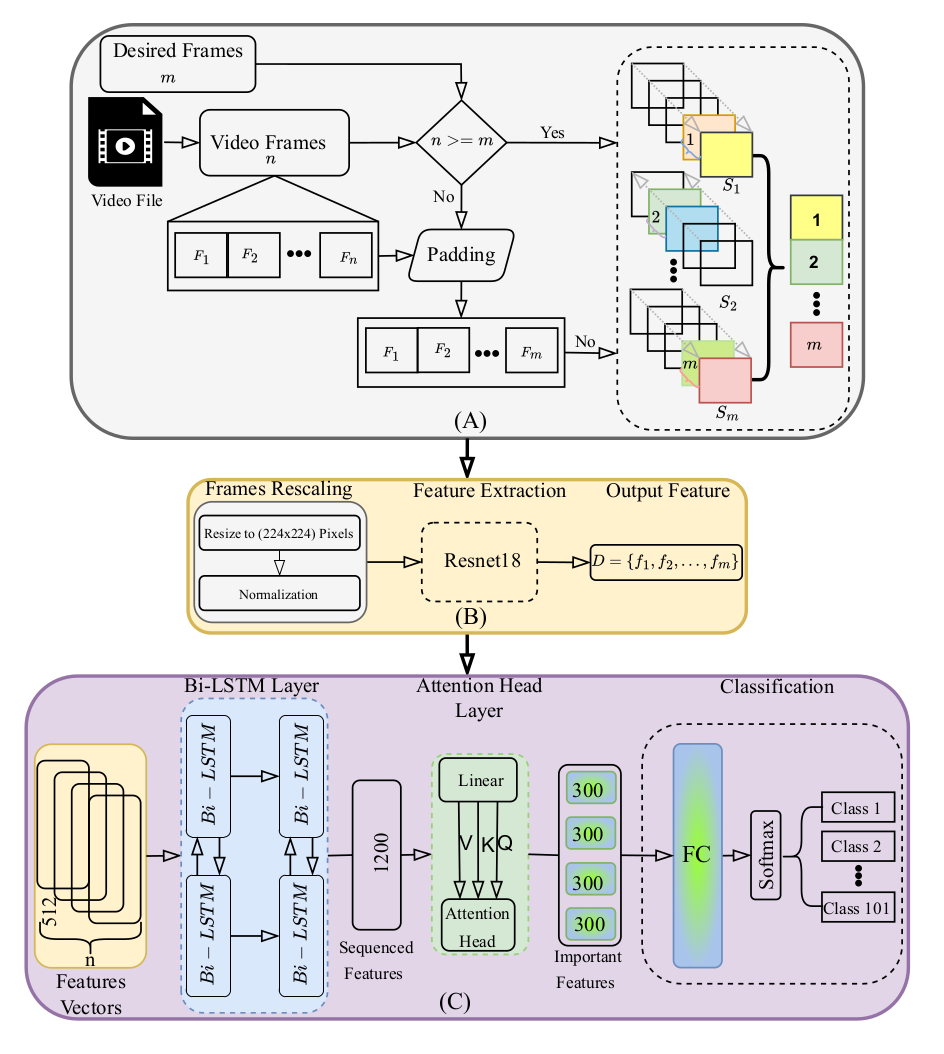
Multi-Head Attention-Based Framework with Residual Network for Human Action Recognition
Basheer Al-Tawil, Magnus Jung, Thorsten Hempel, Ayoub Al-Hamadi
MDPI Sensors 2025 [paper]
IM HERE – Interaction Model for Human Effort based Robot Engagement
Dominykas Strazdas, Magnus Jung, Jan Marquenie, Ingo Siegert, Ayoub Al-Hamadi

Automating 3D Dataset Generation with Neural Radiance Fields
Paul Schulz, Thorsten Hempel, Ayoub Al-Hamadi

Toward Truly Intelligent Autonomous Systems A Taxonomy of LLM Integration for Everyday Automation
Magnus Jung, Thorsten Hempel, Basheer Al-Tawil, Qiaoyue Yang and Sven Wachsmuth, Ayoub Al-Hamadi
ROBOVIS 2025
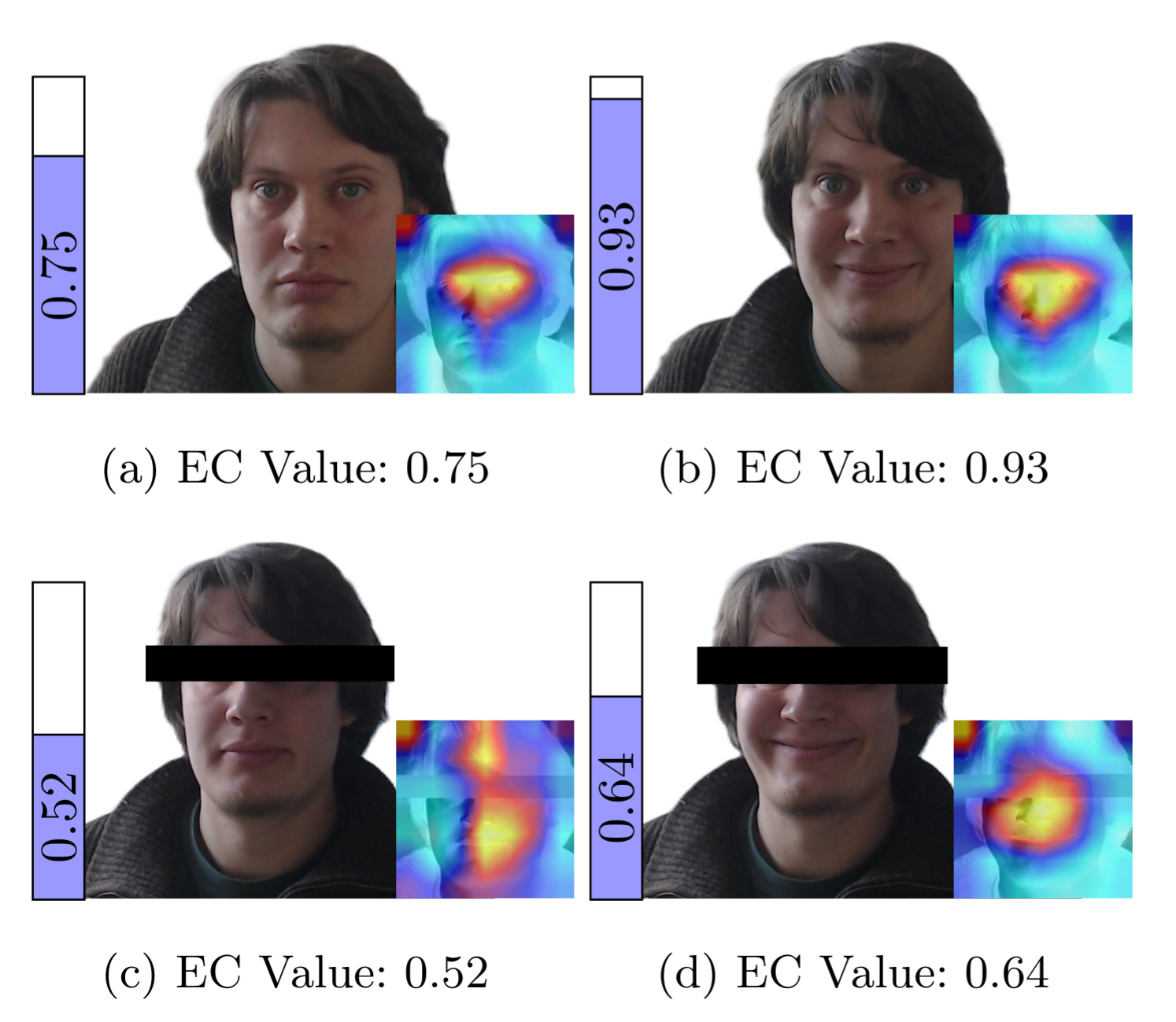
Eye Contact Based Engagement Prediction for Efficient Human-Robot Interaction
Magnus Jung, Ahmed A. Abdelrahmanand, Thorsten Hempel, Basheer Al-Tawil, Qiaoyue Yang, Sven Wachsmuth, Ayoub Al-Hamadi
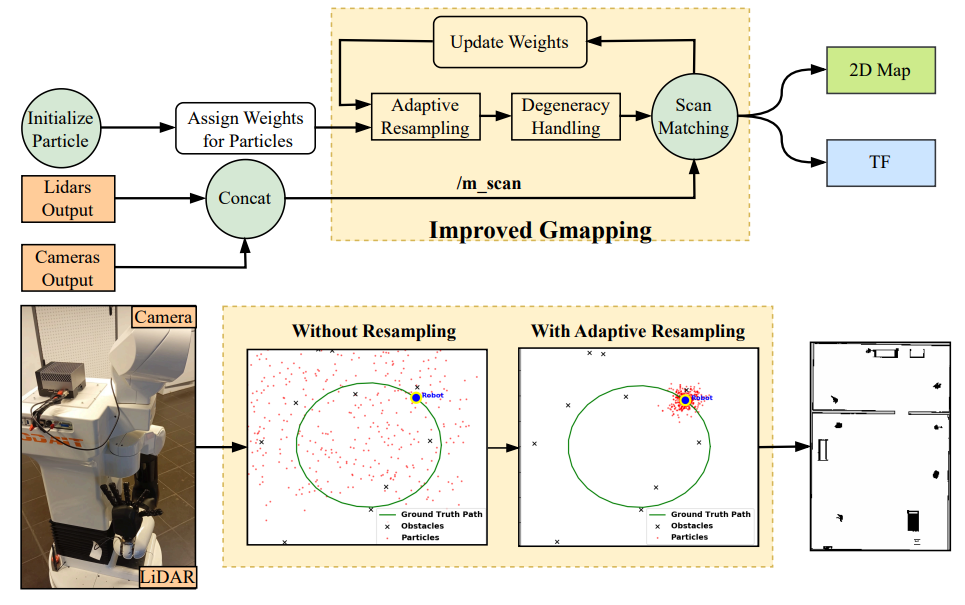
Mobile Robot Navigation with Enhanced 2D Mapping and Multi-Sensor Fusion
Basheer Al-Tawil, Adem Candemir, Magnus Jung, Ayoub Al-Hamadi
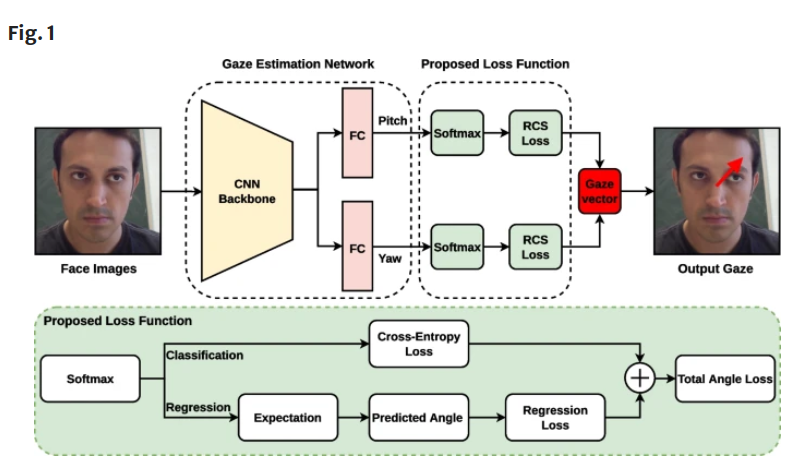
Fine-grained gaze estimation based on the combination of regression and classification losses
Ahmed A. Abdelrahman, Thorsten Hempel, Aly Khalifa, Ayoub Al-Hamadi
Springer Applied Intelligence 2024 [paper]

NITEC: Versatile Hand-Annotated Eye Contact Dataset for Ego-Vision Interaction
Thorsten Hempel, Magnus Jung, Ahmed abdelrahman, ayoub al-hamadi
WACV2024