IM HERE – Interaction Model for Human Effort-Based Robot Engagement
We present IM HERE, a formal effort-based framework for modeling engagement across human–robot, human–human, and robot–robot interaction. It captures relational dynamics, supports group interactions, and offers a modular implementation for real-world robotic systems.
IM HERE – Interaction Model for Human Effort-Based Robot Engagement
Engagement is a core requirement for natural and adaptive human–robot interaction (HRI), but remains challenging to generalize across contexts.
Our IM HERE framework introduces a formal, generalizable model based on the idea that engagement can be quantified through the observable and interpretable effort between entities.
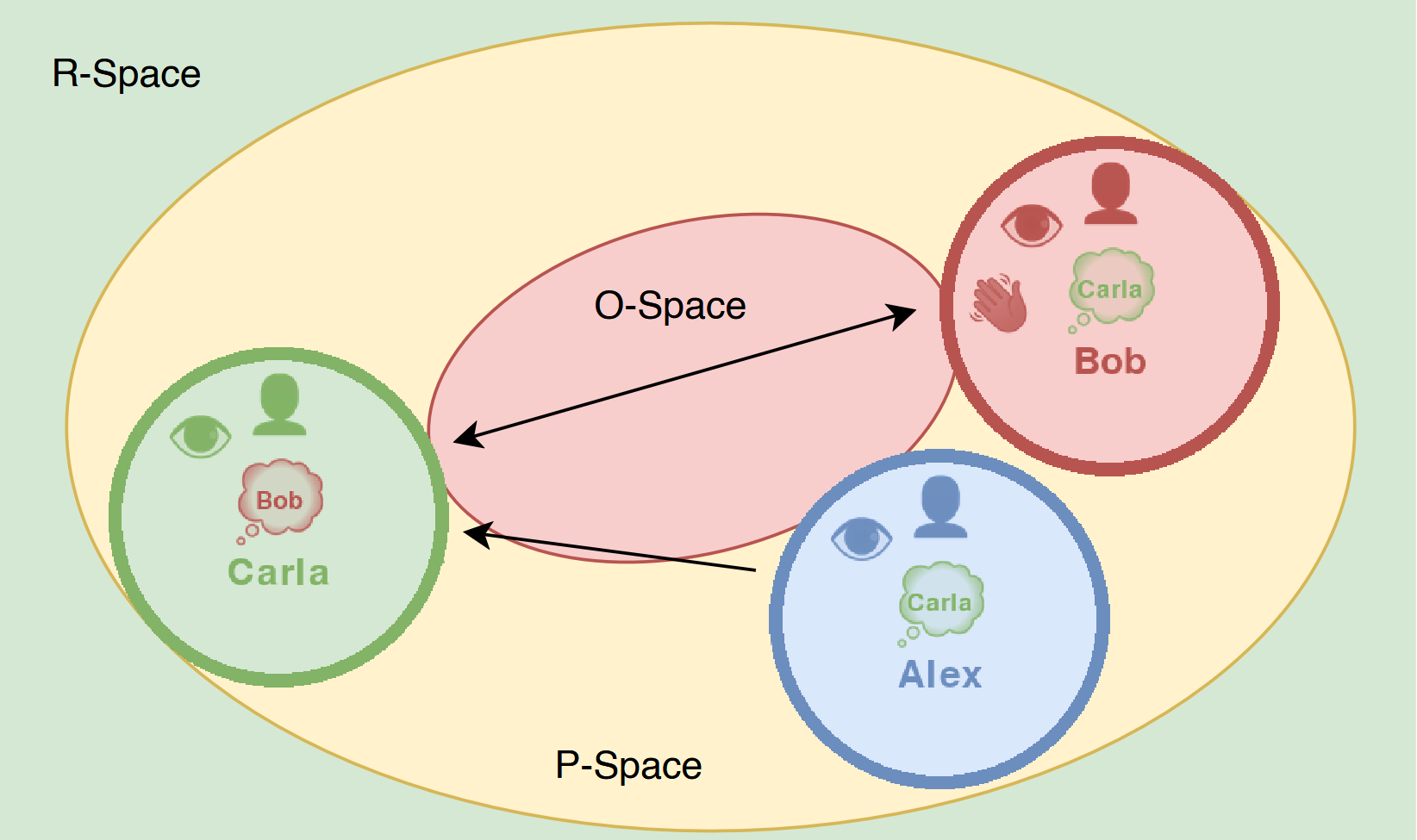
The model represents bilateral relationships between any two entities—human, robot, or object—by continuously tracking:
- Focus — the allocation of cognitive or perceptual resources.
- Effort — measurable signals (e.g., gaze, speech, gestures) indicating engagement.
Each interaction is mapped to one of four fundamental states:
Passive, Requested, Buildup, and Engaged.
Key features:
- Bridging perspectives: Integrates both subjective (self-perceived) and objective (externally observed) viewpoints.
- Miscommunication handling: Detects and accounts for mismatched engagement states.
- Norm compliance: Supports socially appropriate interaction behaviors.
- Scalable: Applies to individual and multi-party scenarios, incorporating F-formations to handle group dynamics.
- Generalizable: Works across human–human, human–robot, and robot–robot contexts.
- Implementation-ready: Includes a modular open-source simulator for testing and visualizing engagement in real-time HRI scenarios.
The IM HERE framework offers a clear, computationally grounded approach for autonomous systems to reason about their role in dynamic interactions—facilitating natural, safe, and socially aligned behaviors.
Fulltext Access
Published in 2025 IEEE CogSIMA
Citing
@INPROCEEDINGS{strazdas_IMHERE,
author={Strazdas, Dominykas and Jung, Magnus and Marquenie, Jan and Siegert, Ingo and Al-Hamadi, Ayoub},
booktitle={2025 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA)},
title={IM HERE: Interaction Model for Human Effort-Based Robot Engagement},
year={2025},
pages={95-102},
keywords={Social Robots; Human-Robot Interaction; Engagement; Attention Estimation; F-formation; Autonomous Systems},
doi={10.1109/CogSIMA64436.2025.11079517}
}