Robot System Assistent
RoSA
RoSA Project
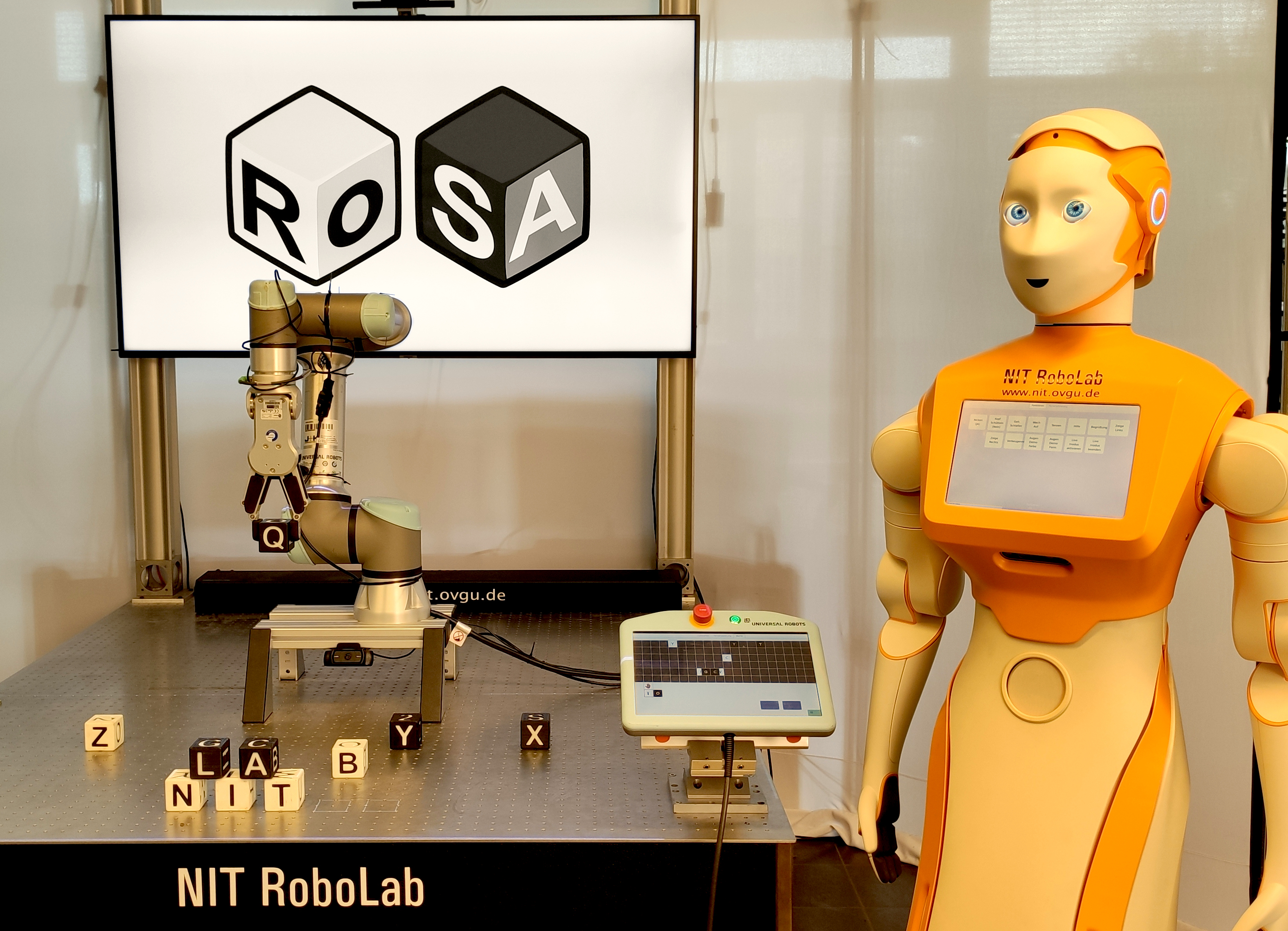
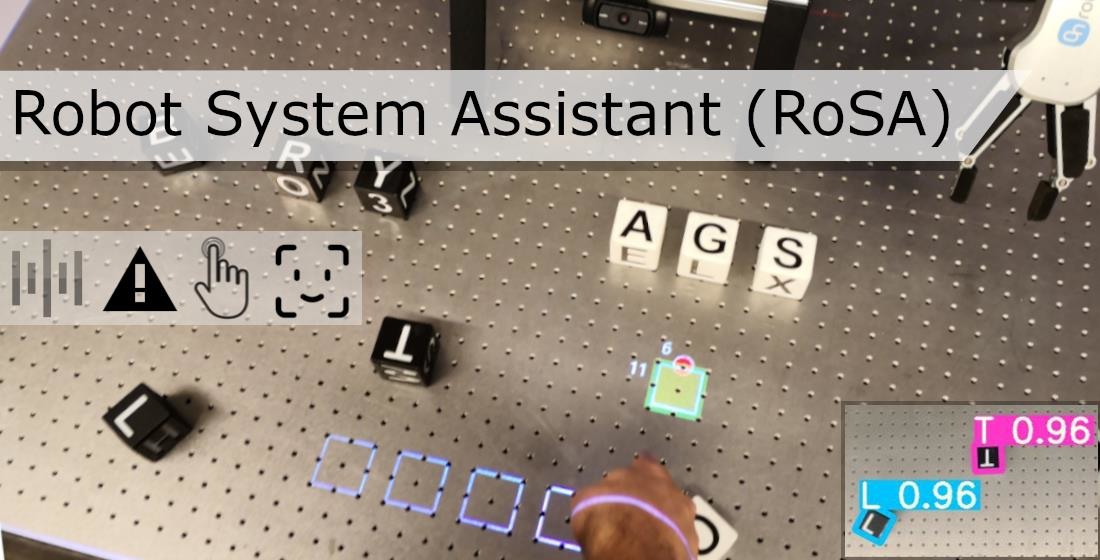
RoSA (Robot System Assistant) is an intuitive multimodal interface for interacting with robots through speech, touch, and gestures. Developed through a multi-year research project, RoSA has evolved from a Wizard-of-Oz prototype into a robust control interface, evaluated in both on-site and remote industrial settings. It supports natural human–robot collaboration by simplifying robot selection, task assignment, and feedback in dynamic multi-robot environments.

RoSA: Evaluation of Touch and Speech Input Modalities for On-Site HRI and Telerobotics
June 06, 2025
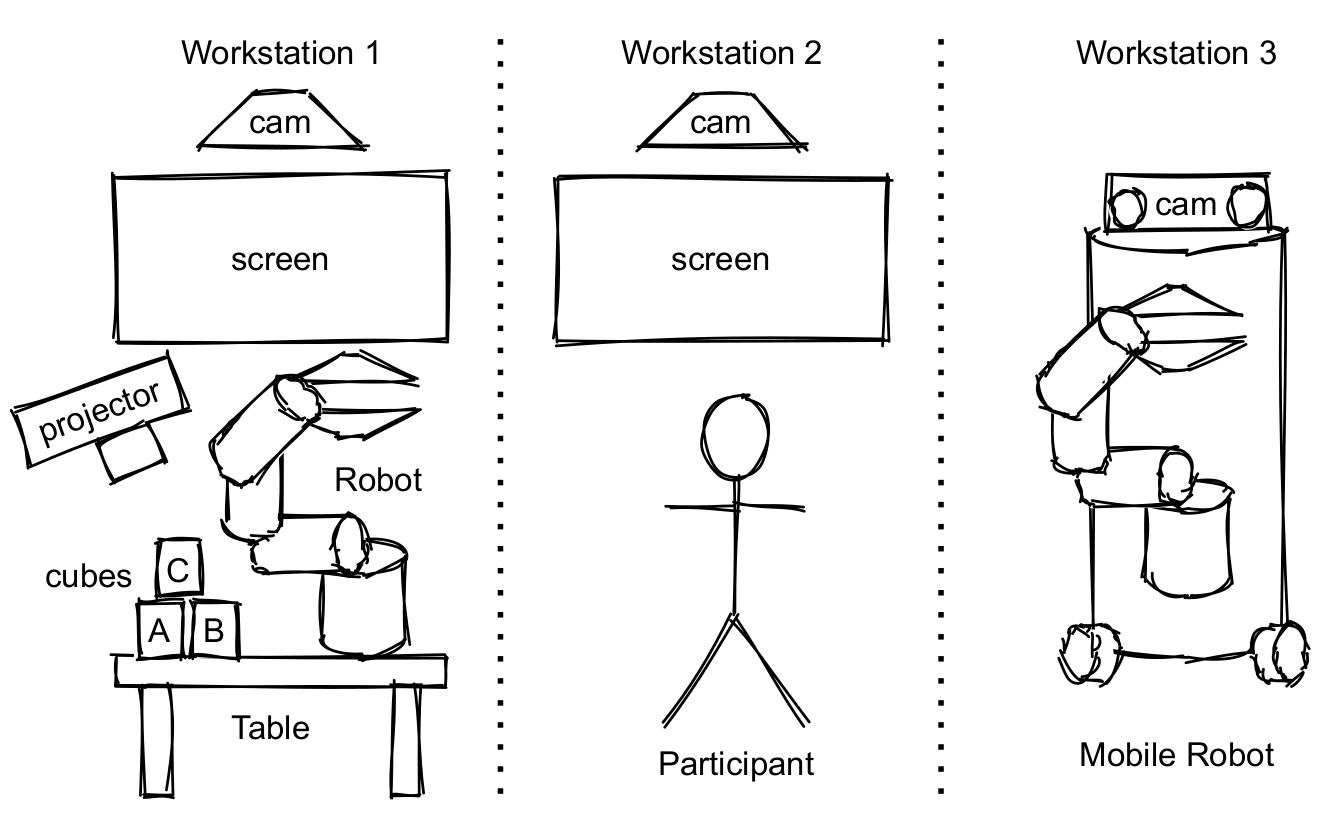
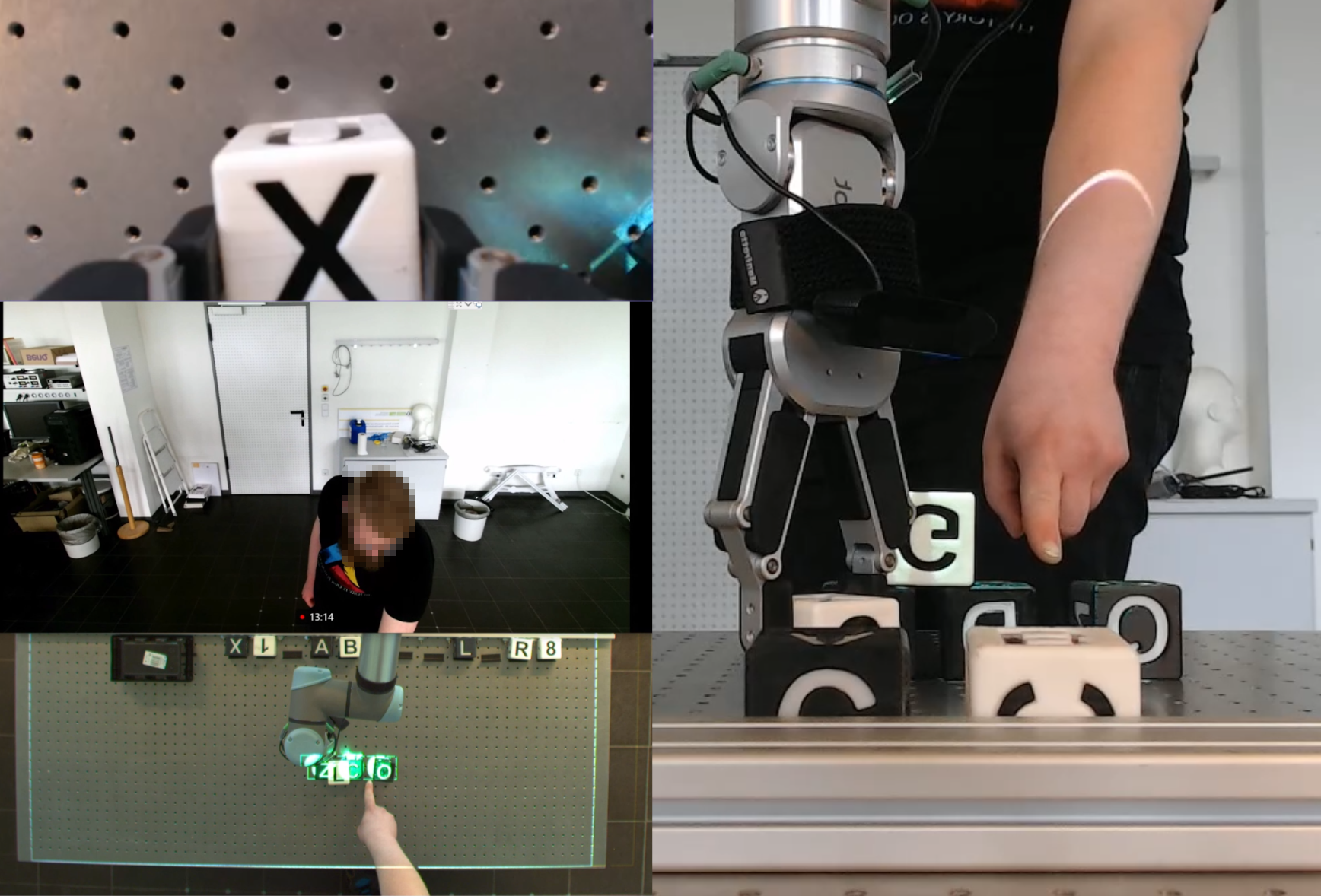
This study evaluates the RoSA framework in hybrid scenarios, comparing touch and speech input for both local and remote human–robot...
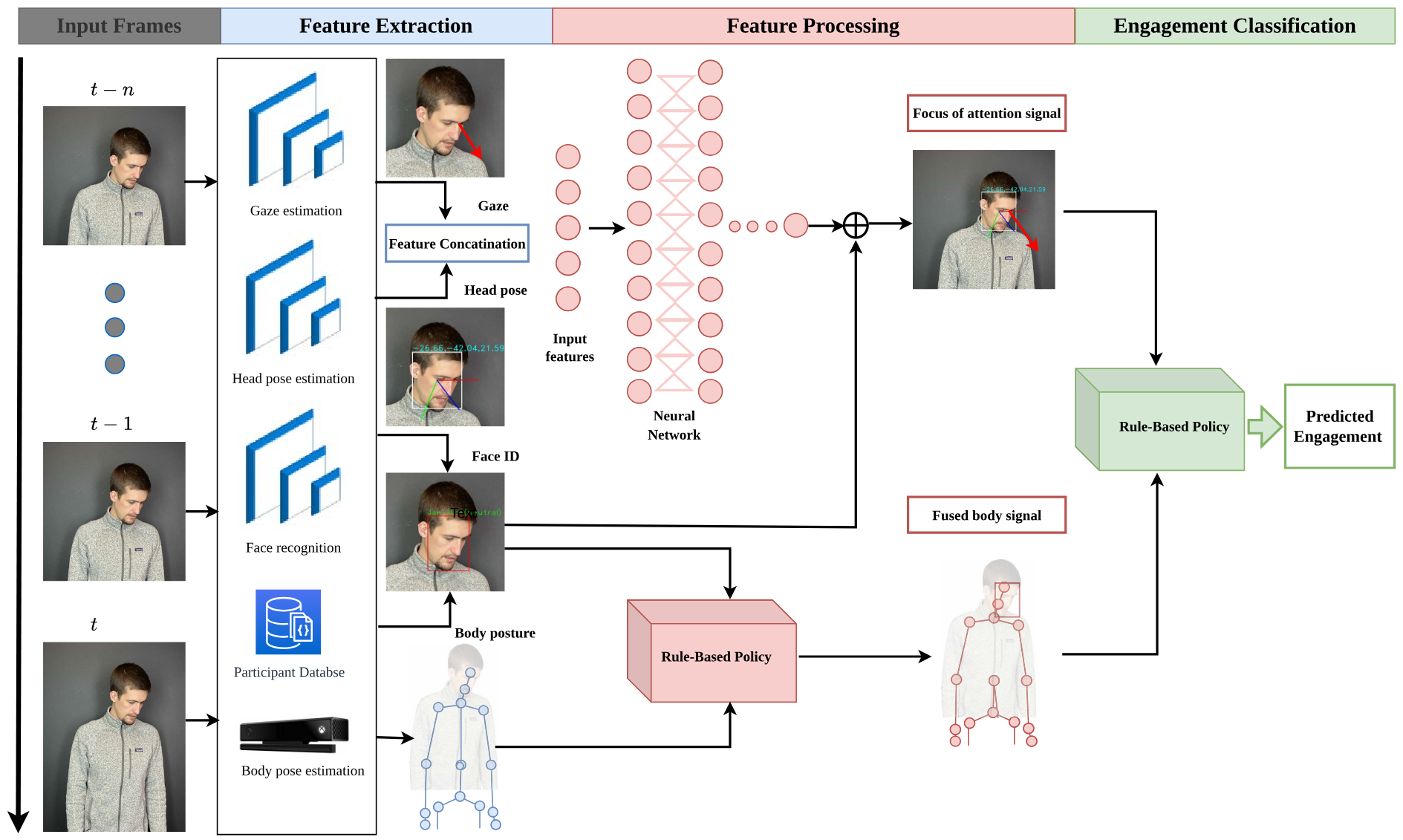
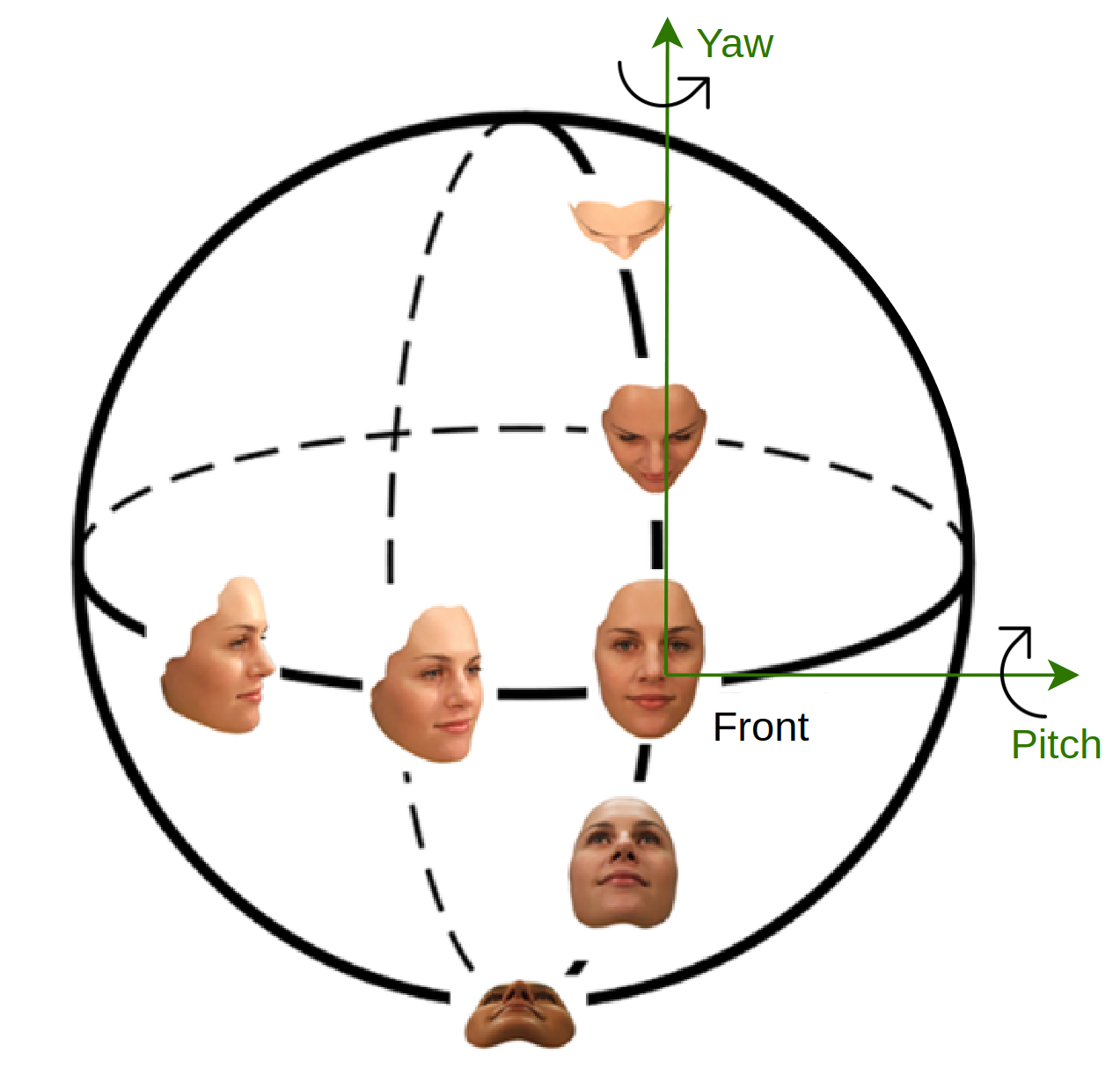
Multimodal Engagement Prediction in Multiperson Human–Robot Interaction
June 13, 2022
A real-time multimodal system for predicting engagement and disengagement in collaborative industrial HRI, using deep learning and rule-based approaches.
Face Recognition and Tracking Framework for Human–Robot Interaction
May 30, 2022
A real-time face recognition and tracking system for intuitive HRI, integrating lightweight CNNs and ROS.
RoSA: Towards Intuitive Multi-Modal and Multi-Device Human–Robot Interaction
January 28, 2022
Building on a prior Wizard-of-Oz study, this paper presents a fully autonomous RoSA system using speech, face, and gesture input...
RoSA: Concept for an Intuitive Multi-Modal and Multi-Device Interaction System
October 27, 2021
Conceptual framework for RoSA — a multi-modal, multi-device human–robot interaction assistant with speech, gesture, and facial recognition.
Robots and Wizards: An Investigation Into Natural Human–Robot Interaction
November 19, 2020
This study explores natural human–robot interaction using a Wizard-of-Oz approach to understand intuitive user behavior in multimodal robot control.